REVISÃO
Locomoção humana sob a
perspectiva dos sistemas dinâmicos: teoria e implicações clínicas
Human locomotion within dynamical systems perspective: theory and
clinical implications
Kênia Kiefer Parreira de
Menezes, D.Sc.*, Diego Leite, M.Sc.*,
Patrick Roberto Avelino, Ft.**
*Programa
de
Pós-graduação em Ciências da
Reabilitação, Escola de Educação
Física,
Fisioterapia e Terapia Ocupacional (EEFFTO), Universidade Federal de
Minas
Gerais, Belo Horizonte MG, **Universidade Federal de Minas Gerais, Belo
Horizonte MG
Recebido em 15 de maio
de 2019; aceito em 3 de julho de 2020.
Correspondência: Kênia
Kiefer Parreiras de Menezes, Av. Pres. Antônio Carlos, 6627 Pampulha 31270-901
Belo Horizonte MG
Kênia Kiefer P. Menezes:
keniakiefer@yahoo.com.br
Diego Leite: diego.xav@hotmail.com
Patrick Roberto Avelino:
patrickpk4@yahoo.com.br
Resumo
A locomoção é uma
função humana básica que permite ao indivíduo explorar seu ambiente e executar
ações apropriadas. A locomoção também pode ser vista do ponto de vista
energético, como uma forma de dissipar energia dentro de um sistema
termodinâmico. Tradicionalmente, o controle da locomoção tem sido estudado sob
a perspectiva de redes neuronais no sistema nervoso central. Abordagens mais
recentes têm tentado fornecer uma visão diferenciada para o controle motor,
como a abordagem dos Sistemas Dinâmicos ou Teoria dos Padrões Dinâmicos.
Portanto, o objetivo do presente estudo foi revisar os princípios teóricos da
aplicação da abordagem dos sistemas dinâmicos para o entendimento da locomoção
humana e discutir as implicações práticas dessa abordagem para a área da
reabilitação. A abordagem dos Sistemas Dinâmicos é uma teoria que assume a
importância dos vários subsistemas do organismo humano, que seriam controlados
pelas leis dinâmicas da física. De forma geral, seria um sistema de
auto-organização que busca estratégias mais eficazes de acordo com os recursos
disponíveis e as limitações impostas pelo ambiente. Através dessa linha de
raciocínio, podemos interpretar como acontece o processo de locomoção humana,
seus padrões de ocorrência e ainda aplicá-la para a marcha de populações
especiais, como paralisia cerebral, acidente vascular encefálico, dor lombar,
dentre outros.
Palavras-chave: locomoção, teoria de
sistemas.
Abstract
Locomotion
is a basic human function, which allows the individual to explore his
environment and perform appropriate actions. The locomotion also can be seen
from the energy point of view, as a means of dissipating energy in a
thermodynamic system. Traditionally, the locomotion control has been studied
from the standpoint of neural networks in the central nervous system. More
recent approaches have been tried to provide a different perspective for motor
control, such as the approach of Dynamical Systems or Dynamical Patterns
Theory. Therefore, the objective of this study was to review the theoretical
principles of the application of dynamical systems approach to understanding
human locomotion and discuss the practical implications of this approach to the
field of rehabilitation. The approach of Dynamical Systems is a theory that
assess the importance of the various subsystems of the human body, which would
be controlled by the dynamic laws of physics. In general, would be a system of
self-organization looking for the most effective strategies in accordance with
available resources and constraints imposed by the environment. Then, we can
interpret the process of human locomotion, their patterns of occurrence and
apply it to the gait of special populations, such as cerebral palsy, stroke,
low back pain, among others.
Keywords: locomotion,
systems theory.
Introdução
A locomoção é uma
função humana básica, que permite ao indivíduo explorar seu ambiente e executar
ações apropriadas [1,2]. A locomoção também pode ser vista do ponto de vista
energético, como uma forma de dissipar energia dentro de um sistema
termodinâmico [2]. Tradicionalmente, o controle da locomoção tem sido estudado
sob a perspectiva de redes neuronais no sistema nervoso central (SNC) [3-8]. É
assumido que existem redes especializadas na medula espinhal que seriam
responsáveis pelo padrão rítmico da locomoção, denominadas Geradores de Padrão
Central [3,5,8]. Sob essa perspectiva, sinais vindos de níveis superiores do
SNC (exemplo, córtex cerebral, centro mesencefálico
da locomoção) seriam responsáveis por ativar esses geradores de padrão, que por
sua vez, desencadeariam o padrão oscilatório de flexão em um membro e extensão
no membro oposto observado nas formas de locomoção como a marcha e a corrida
[3,8]. Informações aferentes vindas de receptores musculares, receptores
articulares do quadril e mecanoceptores na planta dos
pés seriam importantes para moldar o padrão de locomoção, tornando-o adaptativo
a condições externas [7].
As evidências científicas
que sugerem a existência desses geradores de padrão para a locomoção são
baseadas em estudos em animais. Experimentos em gatos tentaram comprovar a
existência dessas redes neuronais por meio de diferentes condições
experimentais como, descerebração, transecção medular
e bloqueio de informação aferente [9-11]. Esses estudos evidenciaram que mesmo
sem informação aferente ou retirando-se a comunicação com centros superiores do
SNC, o padrão típico de locomoção podia ser licitado quando esses animais eram postos
em uma esteira e tinham o seu peso corporal sustentado, esse tipo de marcha foi
denominado marcha fictícia. Estudos tentaram estabelecer a existência desses
geradores de padrão em humanos por meio de experimentos em indivíduos com lesão
medular [12,13] e da análise de padrões temporais e eletromiográficos
da marcha [5]. Esses estudos são limitados para o entendimento da locomoção,
pois assumem uma relação de causa e efeito entre lesões induzidas no SNC e
fenômenos neurofisiológicos e o controle da locomoção. Dessa forma, essa
perspectiva teórica para o entendimento da locomoção não leva em conta, de
maneira apropriada, os problemas levantados por Bernstein, como a variabilidade
dependente do contexto [14].
Abordagens mais
recentes têm tentado fornecer uma visão diferenciada para o controle motor,
como a abordagem dos Sistemas Dinâmicos ou Teoria dos Padrões Dinâmicos
[15-17]. Essa abordagem teórica é baseada nos princípios da sinergética, uma
teoria física que assume que a estrutura ou mudanças de estrutura em sistemas
abertos e em não equilíbrio ocorrem de maneira auto-organizante.
As transições de fase ocorrem quando condições ambientais (ou parâmetros de
controle) atingem um ponto crítico. Esses sistemas são governados por poucos
graus de liberdade, entretanto, podem exibir comportamentos altamente complexos
[15]. As predições dessa nova abordagem foram obtidas por meio de estudos que
analisaram movimentos rítmicos dos dedos ou mãos de acordo com um parâmetro de
controle (frequência de oscilação dos segmentos) que exerceu influência sobre o
parâmetro de ordem (padrão de fase entre os segmentos de cada membro) [16].
Aumentando-se a frequência de oscilação foi observada uma transição de fase
(bifurcação) de um padrão fora de fase para um padrão em fase, transição
ocorrida de maneia auto-organizante, sem necessidade
de evocação de um processo cognitivo ou representacional. Partindo-se do
pressuposto de que a locomoção é um processo rítmico, as predições dessa nova
abordagem têm sido utilizadas para o seu entendimento, de forma a realizar uma
descrição dinâmica e predições de seus parâmetros [2,18,19].
Considerando-se o
contexto da reabilitação física, meios de locomoção (marcha, corrida) são
utilizados como desfechos clínicos [20,21], marcadores do estado funcional [22]
e formas de intervenção [23-25]. Dessa forma, a locomoção é um ponto chave dentro
da área da reabilitação. Quando analisados os estudos sobre locomoção na área
da reabilitação, é possível perceber que grande parte tem como referencial
teórico, de forma explícita ou implícita, as abordagens mais tradicionais de
controle motor. Entretanto, estudos recentes na área da reabilitação têm
utilizado como referencial teórico a abordagem dos sistemas dinâmicos [19], Hamill et al. [26] e Ho et al. [27], como
exemplos. É possível que esses estudos forneçam importantes subsídios para a
prática clínica em fisioterapia e possam servir como embasamento teórico para
algumas intervenções já utilizadas. Além disso, é possível que novas
intervenções, pautadas na abordagem dos sistemas dinâmicos, possam surgir.
Portanto, os objetivos
deste ensaio teórico foram: 1) Revisar os princípios teóricos da aplicação da
abordagem dos sistemas dinâmicos para o entendimento da locomoção humana e 2)
discutir as implicações práticas dessa abordagem para a área da reabilitação.
Material e métodos
Para condução do
presente estudo foram pesquisados estudos nas bases de dados Medline e Science
Direct. Os descritores utilizados para a busca bibliográfica, de acordo com o MeSH, foram: Locomotion,
Nonlinear Dynamics, Systems Theory,
Coordination e Walking.
Além disso, foram pesquisados artigos e capítulos de livros de autores
renomados na área, como Kenneth G. Holt. A partir da leitura dos títulos e
resumos de todo o material encontrado, foram selecionados os estudos e
capítulos de livros mais pertinentes para a condução deste ensaio teórico. Os
principais achados desses estudos, bem como suas implicações para o
entendimento da locomoção humana e para a área da reabilitação, são discutidos
a seguir.
Resultados e discussão
Modelos teóricos para a
locomoção - Oscilador harmônico híbrido e Escapement driven damped inverted
pendulum/ mass-spring
system
Como ressaltado
anteriormente, a abordagem dos sistemas dinâmicos tem como princípio o estudo
do controle e coordenação dos movimentos humanos considerando sistemas
oscilatórios, rítmicos. Esses sistemas seguem uma dinâmica não linear e são
governados por leis naturais (leis físicas). Dado que esses sistemas são
governados por leis físicas, é possível realizar predições de seus parâmetros
por meio de equações matemáticas [28]. A seguir serão discutidos alguns modelos
teóricos, que por meio de equações matemáticas, são capazes de explicar a
locomoção humana. O primeiro desses modelos é o Oscilador Harmônico Híbrido.
Analisando a fase de
balanço da marcha humana, o membro inferior oscila como um todo, sendo a
articulação do quadril o eixo de rotação. Além do componente gravitacional, que
seria a massa e comprimento dos segmentos dos membros inferiores e a ação da
gravidade sobre eles, existe um componente elástico, representado pelos
músculos, tendões, fáscias e ligamentos presentes em todo o membro inferior,
todos esses subcomponentes são representados por uma mola que representa a
rigidez global do sistema. Considerando que esse sistema oscilatório possui dois
componentes, um gravitacional e outro elástico, ele é considerado um sistema
híbrido. Além disso, é um sistema harmônico porque conserva energia durante sua
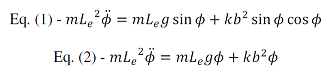
oscilação [18,19]. A equação Newtoniana que representa esse modelo é
apresentada na Equação 1. Onde, ϕ
é o deslocamento angular do pêndulo (ou do quadril), sua segunda derivada (ϕ) é a aceleração
angular, m a massa da perna, Le o comprimento equivalente do eixo
de rotação até o centro de massa da perna e kb²
representa a rigidez dos tecidos. Considerando-se que a amplitude de oscilação
é pequena (ϕ < 20°), podemos
assumir que sinϕ ≈ ϕ e cosϕ ≈ 1. Logo, a equação pode ser simplificada
de acordo com a Equação 2. Essa equação contêm os dois componentes do modelo, o
momento de força pela gravidade e o momento de força pelo componente elástico.
Nesse modelo, o damping (mecanismos de perda
de energia) e o forcing (mecanismos de injeção de
energia no sistema) não são considerados para a determinação da frequência de
oscilação do pêndulo (embora eles influenciem na amplitude de oscilação).
A
partir dessa equação
é possível obter equações para
predição da frequência preferida de
locomoção e
para a rigidez da perna durante diferentes formas de
locomoção (ver Obusek et al. [29] e Holt et al. [18] para
mais detalhes). O segundo modelo para o entendimento da locomoção humana
considera os componentes damping e forcing citados anteriormente. Esse modelo é
utilizado para a fase de apoio da marcha, na qual o membro inferior é modelado
como um pêndulo invertido, pois o eixo encontra-se agora na articulação do
tornozelo [2,19,28,30]. Nesse modelo, o momento devido ao damping
corresponderia às perdas de energia por fricção tecidual e pelo contato inicial
do membro oposto (que estava na fase de balanço) e para manter a oscilação do
pêndulo (já que ocorrem perdas de energia) temos o componente forcing, que corresponderia aos inputs de energia no
sistema, como a força aplicada durante a fase de push-off
da marcha [2,19]. O instante para fornecimento de energia é determinado pela
própria dinâmica do sistema, dispensando a presença de processos
probabilísticos. A equação desse modelo é apresentada na Equação 3. Sendo que, FL cos θ seria o componente forcing (injeção de energia no sistema), mLg sin θ
o
componente gravitacional, kb sin θb cos θ o componente elástico
e c(θ)b cos θ o
componente damping (perdas de energia por
fricção e pelo contato inicial contralateral).

Potencialmente, esse
modelo pode ser utilizado para estimar as diferentes fontes de energia para a
locomoção. Também é possível realizar predição da rigidez do membro,
partindo-se do pressuposto que o oscilador está em equilíbrio, ou seja, o
componente forcing é igual ao componente damping.
Desenvolvimento da
locomoção sob a perspectiva dos Sistemas Dinâmicos
Um estudo de Holt et
al. [31] investigou como crianças na fase de aquisição de marcha descobrem
a dinâmica do sistema pêndulo / mola para a locomoção. Para tanto, esse autor
investigou a cinemática e cinética da marcha de crianças no momento da
aquisição de marcha e durante os sete meses subsequentes, realizando
reavaliações mensais. Foi observado que, entre o momento de aquisição da marcha
e um mês após, ocorreu um aumento no comprimento do passo e na frequência do
passo (sem alterações antropométricas concomitantes). Outro resultado foi que o
pico de força de escapamento (peak escapement force) foi negativo, o que indica que ele
ocorreu após o contato inicial do pé, ou seja, durante o apoio duplo, momento
no qual teria um efeito mais adaptativo, um efeito de propulsão. Já a
aceleração angular do centro de massa tornou-se mais positiva no momento do
apoio duplo, indicando que ela ocorreu na mesma direção da linha de progressão.
Uma característica básica do mecanismo pendular de marcha é a restrição dos
movimentos no plano sagital, tanto na fase de apoio, quanto de balanço, com
poucos movimentos nos planos transverso e frontal. Foi observado que as
crianças após um mês da aquisição da marcha apresentaram um aumento nos movimentos
da perna no plano sagital. Entretanto, sem alterações nos planos frontal ou
transverso.
Além de mecanismos
passivos (elasticidade dos tecidos biológicos) e gravitacionais (massa dos
segmentos sob a ação da força da gravidade), forças musculares podem exercer
influência sobre essa dinâmica, podendo restringir ou facilitar. Dessa forma, crianças
no período após aquisição da marcha aprendem a prover forças que podem
complementar a dinâmica do sistema pêndulo / mola, permitindo assim, uma máxima
progressão para frente do centro de massa com um custo muscular (energético)
mínimo [31].
O aprendizado de uma
nova dinâmica pode ocorrer de maneira abstrata. Modos de locomoção que sejam
mecanicamente e metabolicamente eficientes e estáveis são descobertos por um
processo de experimentação. Esse modo de locomoção pode ser de alguma forma,
“sentido” pelo sistema neurofisiológico e utilizado para fortalecer conexões
neurais que produzem o escapamento (escapement)
apropriado. Futuros estudos deverão investigar em detalhes como se dá esse
processo de descoberta e aprendizado de uma nova dinâmica [31].
De acordo com Holt et
al. [32] o desenvolvimento da dinâmica da locomoção envolve duas fases. A
primeira foi citada anteriormente. A segunda fase ocorreria nos próximos meses
e corresponderia ao desenvolvimento de uma relação de 1:1 entre a rigidez (que
determina a frequência de oscilação) do componente elástico e o componente
pendular (dependente das propriedades antropométricas e da ação da gravidade).
Para Holt et al. [32] essa relação seria necessária para que os dois
componentes oscilatórios ajam em ressonância, tornando possível realizar
predições de seus parâmetros (e.g. frequência preferida). Entretanto, esses
autores ressaltam que nem sempre essa relação é mantida numa relação de 1:1,
como podemos perceber na corrida de adultos e na locomoção de crianças com
Paralisa Cerebral (PC), meios de locomoção nos quais o componente elástico
exerce maior influência, seja por meio de contração muscular (no caso da
corrida) ou por meio de propriedades musculares passivas (no caso de crianças
com PC).
Holt et al. [32]
demonstraram nesse estudo que durante os sete meses após a aquisição da marcha
as crianças apresentam um aumento no componente elástico do modelo (>n), o
que faz com que a relação se torne > 1:1 (valores de n chegam a
aproximadamente 3 à partir do terceiro mês de marcha), exceto no primeiro mês
quando essa relação é próxima de 1:1. A hipótese levantada por esses autores é
a de que nessa idade, as crianças ainda estão adquirindo aprendizado sobre como
utilizar menos o mecanismo elástico do modelo e mais o mecanismo pendular, de
acordo com as massas e comprimentos dos segmentos dos membros inferiores que
vão se modificando de acordo com o desenvolvimento. É assumido que apenas a
partir dos três anos de idade as crianças seriam capazes de refinar a dinâmica
da locomoção, de forma a escalonar a relação entre o componente elástico e o
pendular (formando uma relação de 1:1), reduzindo assim, o gasto energético
para a locomoção e aumentando a estabilidade. Um achado interessante é o de que
a relação é próxima de 1:1 logo após a aquisição da marcha, mas vai se
distanciando desse valor ideal durante os sete meses subsequentes. A
interpretação de Holt et al. para esse fenômeno é de que no início, a constraint para a locomoção é apenas a estabilidade
para realizar a tarefa desejada no ambiente, sendo que os deslocamentos são
curtos (e.g. alcançar a mãe ou um brinquedo próximos), somente após algum
tempo, o gasto energético passa a ser uma constraint
para a locomoção, momento no qual surge a necessidade de maiores deslocamentos
no ambiente.
Esses estudos fornecem
uma visão alternativa para a compreensão do desenvolvimento da locomoção, visto
tradicionalmente como um processo dependente da neuromaturação
do SNC [33]. Futuros estudos poderão investigar o desenvolvimento da locomoção,
sob a perspectiva da abordagem dos sistemas dinâmicos, acompanhando crianças
até a idade de três anos, momento o qual, aparentemente, as crianças adquirem
um padrão mais maduro de locomoção, explorando uma relação de 1:1 entre os componentes
elástico e pendular do modelo.
Padrões de coordenação
durante a locomoção
Os estudos sobre
coordenação intersegmentar, iniciados pelos
experimentos que investigaram a coordenação entre dedos ou mãos [16,34] foram
expandidos para a análise de padrões de coordenação entre diferentes segmentos
durante a locomoção [35-37]. Esses estudos partem do pressuposto de que
diferentes segmentos podem funcionar como pêndulos que oscilam em ressonância
durante a locomoção.
Já foi demonstrado que
em velocidades baixas de marcha (abaixo de 3,8 km/h) o padrão de coordenação
entre pelve e tronco (tórax) segue em um padrão em fase, ou seja, os dois
segmentos movimentam-se, aproximadamente, na mesma direção. Entretanto, quando
a velocidade de marcha é experimentalmente aumentada para valores acima de 3,8
km/h, ocorre uma transição (bifurcação) de um padrão mais em fase para um
padrão fora de fase [36,37]. Nesse exemplo, a relação de fase entre os
segmentos (pelve e tronco) seria o parâmetro de ordem e a velocidade de marcha
corresponderia ao parâmetro de controle. É observado que antes da transição
ocorre um aumento na instabilidade do padrão que é operacionalizado pelo
desvio-padrão da fase relativa entre pelve e tronco. Dentro da abordagem dos
sistemas dinâmicos é sabido que transições de fase ocorrem na presença de uma
perda na estabilidade do padrão, sendo que um novo padrão estável é alcançado
após a transição (multiestabilidade). Essa
transição de fase seria importante para alcançar um aumento no comprimento do
passo, condizente com aumentos na velocidade de marcha, mas mantendo-se o
tronco, e consequentemente, a cabeça, orientada para frente, na direção em que
o indivíduo se locomove.
Outro padrão de
coordenação já investigado na locomoção humana seria a coordenação entre membro
inferior e membro superior contralateral [35]. Em velocidades baixas de marcha
(abaixo de 2,7 km/h) o padrão de coordenação entre o membro superior e o membro
inferior está numa relação de 2:1, ou seja, os braços realizam duas fases de
balanço por passo, já em velocidades maiores, a razão é de 1:1, ou seja, é
realizada uma fase de balanço do braço para cada passo. Alterações nesses
padrões de coordenação (tronco x pelve; membro superior x inferior) já foram
demonstradas em indivíduos com disfunções ortopédicas ou neurológicas, como
hemiplégicos e indivíduos com dor lombar [38-41] e serão discutidas
posteriormente neste texto.
Tipos de locomoção –
marcha x corrida
A locomoção humana
exibe duas formas básicas, que podem ser observadas de acordo com a velocidade
do deslocamento [42]. Esses dois mecanismos básicos seriam: o mecanismo rígido
de marcha, similar a um “pêndulo invertido”, e o mecanismo flexível de corrida,
trote e salto, similar a uma "bola quicando" [43]. A marcha e a
corrida são alvos de muitas pesquisas que buscam aplicar modelos biomecânicos
na tentativa de compreender a dinâmica envolvida nessas atividades [44]. Esses
dois tipos de locomoção têm componentes tanto de mola quanto de pêndulo,
podendo assim o modelo híbrido ser usado para descrever ambos [2].
De acordo com os tipos
de locomoção, podemos diferenciá-las pela contribuição relativa do componente
elástico para a conservação de energia. Na marcha, observa-se o modelo do
pêndulo, em que as trocas de energia potencial e energia cinética no centro de
massa são alcançadas por meio dos efeitos gravitacionais [2]. Já a corrida é
comparada a uma “bola quicando”, a maior parte da energia é conservada por
armazenamento nas propriedades da mola, como os músculos e tecidos moles
[2,42]. Adotando o modelo híbrido como referência, uma vez que a rigidez dos
tecidos é maior durante a corrida, uma razão maior entre kb²:
mLeg (constante n) seria encontrada [2]. Um
estudo de Cavagna et al. [43], suporta a ideia
de que a corrida pode ser descrita como uma sucessão de saltos verticais do
corpo. O complexo sistema de músculos que se contraem e os tendões das pernas e
pés representam a rigidez de uma mola vertical hipotética, sobre a qual todo o
corpo salta a cada passo.
A transição entre esses
dois tipos de locomoção comporta-se como uma transição de fase entre dois
atratores, além disso ocorre de forma a minimizar o gasto energético do sistema
musculoesquelético e cardiovascular [44,45]. Em velocidades acima de 8,0 km/h a
corrida requer menor gasto energético (por metro percorrido) do que a marcha e
a transição entre marcha e corrida ocorre próximo de uma velocidade de 8,0 km/h
[45]. Diedrich et al. [45] investigaram em
detalhes a transição entre esses tipos de locomoção e demonstraram que as
mudanças em relação ao comprimento do passo e frequência de oscilação foram
bastante modestas o que sugere que a transição entre os dois tipos de locomoção
dependa mais do gasto energético.
Locomoção em populações
especiais
A locomoção é, para os
animais e seres humanos, uma função crítica que permitir a exploração do
ambiente em busca de alimento, abrigo e um companheiro. Restrições funcionais
nessa atividade podem advir de diversos fatores, sendo eles a fadiga, instabilidades
(que podem levar a quedas ou medo de cair), força muscular limitada, dor e/ou
controle neurológico insuficiente ou inadequado [2]. As mudanças qualitativas
na coordenação do movimento emergem espontaneamente como resultado de
inespecíficas e contínuas alterações nos parâmetros de controle [35]. Diversas
são as patologias que podem comprometer a locomoção em humanos, como Paralisia
Cerebral (PC), hemiplegia/ hemiparesia decorrente de Acidente Vascular
Encefálico (AVE), dor lombar, uso de próteses nas pernas, doença de Parkinson,
entre outros. No entanto, as disfunções de movimento não são apenas uma
consequência de alterações estruturais, mas também podem ser entendidos como
uma organização espaço-temporal anormal na coordenação do movimento [35].
A PC leva muitas vezes
a déficits de força muscular e hipertonia [40]. Durante a marcha desses
indivíduos, há um aumento na cocontração muscular,
além de um aumento da rigidez muscular passiva que aumentam a rigidez global
dos membros. Segundo o modelo híbrido, é possível calcular o valor da constante
n se o sistema está em sua frequência natural e este valor irá indexar a
rigidez do membro em relação ao componente gravitacional [2]. Em crianças com
hemiplegia espástica, o valor médio de n é 2,43, valor significativamente
diferente das crianças com desenvolvimento típico, onde n=2 [46]. Esses
resultados indicam que existe um aumento da rigidez em indivíduos com PC, que
provoca um aumento da frequência de locomoção. Esse aumento de rigidez
associado a outros padrões cinemáticos que a marcha de crianças com PC
apresenta, suportam a ideia de uma associação desse tipo de locomoção com a
corrida. A estratégia seria aproveitar-se mais das propriedades elásticas da
corrida, o que não pode ser alcançado na marcha tradicional [2]. Esse padrão,
contudo, apresenta custos energéticos mais elevados, uma vez que há um aumento
no deslocamento vertical do centro de massa, além da presença de cocontração muscular excessiva [47]. Assim, os padrões da
marcha de crianças espásticas podem não ser o típico, mas são muitas vezes
funcionais, pois atingem o objetivo de locomoção através da utilização dos
recursos disponíveis [46].
O AVE está associado
muitas vezes a um comprometimento da capacidade de locomoção desses indivíduos,
sendo divergente a literatura quanto à possibilidade ou não dessa coordenação
ser mantida após esse episódio [39]. Indivíduos com hemiparesia devido a um AVE
apresentam comprometimento sensório-motor múltiplo, que resultam em
incoordenação do movimento [38]. No entanto, poucos estudos atualmente têm
comparado diretamente os padrões de coordenação durante a locomoção de
pacientes com AVE em relação a indivíduos saudáveis, de acordo com as
ferramentas da abordagem dos sistemas dinâmicos. Stephenson
et al. [39], ao colocar indivíduos pós-AVE e saudáveis em uma esteira e
analisar os movimentos dos braços, não observou diferenças nas medidas de
coordenação intersegmentar entre as populações, o que
indica que a coordenação entre os movimentos do braço e da perna durante a
marcha continua preservada nesses indivíduos.
Além disso, existiam
nessas esteiras alças auxiliares que deslizavam em barras paralelas, caso o
indivíduo as necessitasse para a atividade, e foi encontrado que os padrões de
coordenação também não foram afetados pela utilização desses corrimãos de
deslizamento. Já Lamontagne et al. [38]
investigaram a coordenação e a estabilização dos segmentos axiais durante a
marcha com e sem movimentos horizontais voluntários da cabeça, em indivíduos
saudáveis e hemiparéticos por AVE. Os resultados
desse estudo sugerem que as rotações de cabeça durante a caminhada modificam a
coordenação do segmento axial em uma direção específica, enquanto as rotações
pélvicas associadas com locomoção permanecem inalteradas.
A dor lombar é muitas
vezes acompanhada por déficits no movimento. No entanto, não se sabe muito
sobre como o movimento é afetado por esta condição e sobre seu impacto nas
atividades funcionais [41]. Ao se comparar a marcha de indivíduos saudáveis com
aqueles com queixa de dor lombar, encontrou-se um padrão de movimento mais
rígido, menos flexível na coordenação pelve-tronco e ausência de diferenças
significativas na cinemática dos componentes rotacionais [41]. Esses indivíduos
não são capazes de realizar a transição entre um padrão em fase para um padrão
fora de fase entre os segmentos pelve e tronco. Alguns autores justificam que
seria um padrão protetor em resposta à dor, entretanto, estudos recentes já
descartaram essa hipótese [48] e pouco se sabe sobre os fatores causais dessa
alteração na coordenação intersegmentar.
Implicações para a
reabilitação
Baseados na visão da
abordagem dos sistemas dinâmicos sobre a locomoção humana, as consequências
para a reabilitação devem ser consideradas. A reabilitação pode ser orientada
para aproveitar ao máximo das adaptações teciduais emergentes (recursos
dinâmicos disponíveis) [2].
Em uma marcha
“anormal”, a reabilitação deve ser dirigida para a causa da anormalidade. Se um
indivíduo apresenta uma alteração em seu padrão de marcha devido a uma
diminuição da capacidade dos músculos para produzir força suficiente, ou por
alterações na rigidez tecidual passiva, o tratamento deve ser focado nesse
achado, e não na baixa velocidade, alta frequência, comprimento do passo curto
e baixa amplitude de movimento, como exemplos. No entanto, se nada pode ser
feito sobre a causa, ou esta não pode ser identificada, este padrão alterado
deve ser aceito como o ideal para o indivíduo e o objetivo da reabilitação pode
ser o de promover os recursos que possam maximizar esse padrão [2]. Estudos
demonstram que indivíduos com deficiência que apresentam alterações nos
recursos dinâmicos (ex. rigidez passiva, força muscular) exploram e desenvolvem
os recursos remanescentes em seus padrões de marcha adaptados e, assim,
intervenções clínicas destinadas a normalizar um padrão de marcha podem ser
contraindicadas [19]. No entanto, deve-se, se for possível, por meio de uma
intervenção, melhorar um recurso que esteja limitado, proporcionando assim, a
emergência de um padrão de marcha considerado típico, que seja energeticamente
mais eficiente, estável e, talvez, esteticamente melhor [27].
Conclusão
Como visto, a
perspectiva teórica dos sistemas dinâmicos traz modelos e conceitos novos que
nos permitem aplicar à locomoção humana e ao contexto da reabilitação. É uma
teoria que assume a importância dos vários subsistemas do organismo humano, que
seriam controlados pelas leis dinâmicas da física. De forma geral, seria um
sistema de auto-organização que busca estratégias mais eficazes de acordo com
os recursos disponíveis e as limitações impostas pelo ambiente. Essa proposta
de abordagem, ao contrário da visão tradicional de controle motor, exclui a
necessidade do controle do movimento por centros superiores do sistema nervoso.
O modelo de oscilador harmônico híbrido, por exemplo, compara os membros
inferiores a um pêndulo acoplado a uma mola e, dessa forma, o movimento ocorre
tão somente através das propriedades elásticas e gravitacionais do sistema.
Através dessa linha de
raciocínio, podemos interpretar como acontece o processo de locomoção humana,
seus padrões de ocorrência e ainda aplicá-la para a marcha de populações
especiais, como PC, AVE, dor lombar, dentre outros. Essas patologias estão
associadas com alterações nas propriedades dos tecidos do sistema, o que leva à
emergência de um novo padrão, a partir dos novos recursos disponíveis. Essa
interpretação irá influenciar também a prática do terapeuta na reabilitação,
que deve focar sua intervenção sobre os achados do sistema que possam
proporcionar a emergência de um novo padrão (ex. fraqueza muscular, rigidez
passiva) e não nas características da tarefa emergente (ex. velocidade,
equilíbrio). Futuros estudos deverão investigar em mais detalhes as
repercussões do uso desse referencial teórico no processo de reabilitação de
diferentes populações clínicas.
Referências
- Warren
Junior W. Visually controlled locomotion: 40 years later. Ecological Psychology
1998;10:177-219. https://doi.org/10.1207/s15326969eco103&4_3
- Holt
K, Obusek J, Fonseca S. Constraints on disordered
locomotion: A dynamical systems perspective on spastic cerebral palsy. Hum Mov
Sci 1996;15:177-202.
https://doi.org/10.1016/0167-9457(95)00043-7
- Dietz
V. Spinal cord pattern generators for locomotion. Clin
Neurophysiol 2003;114:1379-89. https://doi.org/10.1016/s1388-2457(03)00120-2
- Clarac F. Some historical reflections on
the neural control of locomotion. Brain Res Rev 2008;57:13-21.
https://doi.org/10.1016/j.brainresrev.2007.07.015
- Ivanenko Y, Poppele
R, Lacquaniti F. Motor control programs and walking.
Neuroscientist 2006;12:339-48.
https://doi.org/10.1177/1073858406287987
- Knikou M. Neural control of locomotion
and training-induced plasticity after spinal and cerebral lesions. Clin Neurophysiol 2010;121:1655-8.
https://doi.org/10.1016/j.clinph.2010.01.039
- van
de Crommert H, Mulder T, Duysens
J. Neural control of locomotion: sensory control of the central pattern
generator and its relation to treadmill training. Gait Posture 1998;7:251-63. https://doi.org/10.1016/s0966-6362(98)00010-1
- Duysens J, van de Crommert
H. Neural control of locomotion; Part 1: The central pattern generator from
cats to humans. Gait Posture 1998;7:131-41.
https://doi.org/10.1016/s0966-6362(97)00042-8
- Brown
T. The intrinsic factors in the act of progression in the mammal. Proc R Soc Lond 1911;84:308-19.
https://doi.org/10.1098/rspb.1911.0077
- Grillner S, Zangger P. The
effect of dorsal root transection on the efferent motor pattern in the cat's
hindlimb during locomotion. Acta Physiol Scand 1984;120:393-405.
https://doi.org/10.1111/j.1748-1716.1984.tb07400.x
- Shik M, Orlovsky
G, Severin F. Locomotion of the mesencephalic cat elicited by stimulation of
the pyramids. Biophysics 1968;13:143-52.
- Bussel B, Roby-Brami
A, Rémi NO, Yakovleff A.
Evidence for a spinal stepping generator in man. Paraplegia 1996;34:91-92.
- Bussel B, Roby-Brami
A, Azouvi A, Biraben A, Yakovleff A, Held J. Myoclonus in a patient with a spinal
cord transection. Possible involvement of the spinal stepping generator. Brain 1988;111:1235-45. https://doi.org/ 10.1093/brain/111.5.1235
- Turvey
M, Fitch H, Tuller B. The Bernstein perspective I:
The problems of degrees of freedom and context-conditioned variability. In: Hilssdale N, ed. Human motor behavior: An introduction. 1ª
ed. New Jersey: Lawrence Erlbaum; 1982. p. 239-52.
- Kelso
J, Schöner G. Self-organization of coordinative
movement patterns. Hum Mov Sci 1988;7:27-46.
https://doi.org/10.1016/0167-9457(88)90003-6
- Kelso
J, Holt K, Rubin P, Kugler P. Patterns of human interlimb coordination emerge
from the properties of non-linear, limit cycle oscillatory processes: Theory
and data. J Mot Behav 1981;13:226-61.
- Scholz
J. Dynamic Pattern Theory - Some implications for therapeutics. Phys Ther 1990;70:827-43.
https://doi.org/10.1093/ptj/70.12.827
- Holt,
K, Hamill J, Andres R. The force-driven harmonic oscillator as a model for
human locomotion. Hum Mov Sci 1990;9:55-68.
https://doi.org/10.1016/0167-9457(90)90035-C
- Fonseca
S, Holt K, Saltzman E, Fetters L. A dynamical model of locomotion in spastic
hemiplegic cerebral palsy: Influence of walking speed. Clin Biomech
(Bristol, Avon) 2001;16:793-805. https://doi.org/10.1016/s0268-0033(01)00067-5
- Lee
M, Kilbreath S, Singh M, Zeman B, Lord S, Raymond J,
Davis G. Comparison of effect of aerobic cycle training and progressive
resistance training on walking ability after stroke: a randomized sham
exercise-controlled study. J Am Geriatr Soc 2008;56:976-85.
https://doi.org/10.1111/j.1532-5415.2008.01707.x
- Smania N, Bonetti P, Gandolfi M, Cosentino A, Waldner A, Hesse S et.al. Improved gait after
repetitive locomotor training in children with cerebral palsy. Am J Phys Med Rehabil 2011;90:137-49.
https://doi.org/10.1097/PHM.0b013e318201741e
- Kirkwood
R, Moreira B, Vallone M, Mingoti S, Dias R, Sampaio
R. Step length appears to be a strong discriminant gait parameter for elderly
females highly concerned about falls: a cross-sectional observational study. Physiother 2012;97:126-31.
https://doi.org/10.1016/j.physio.2010.08.007
- Scianni A, Teixeira-Salmela L, Ada L. Effect of strengthening exercise in
addition to task-specific gait training after stroke: a randomised
trial. Int J Stroke 2010;5:329-35. https://doi.org/
10.1111/j.1747-4949.2010.00449.x
- Knikou M. Plasticity of corticospinal
neural control after locomotor training in human spinal cord injury. Neural Plast 2012;2012:1-13.
- Rhea
C, Wutzke C, Lewek M. Gait
dynamics following variable and constant speed gait training in individuals
with chronic stroke. Gait Post 2012;36:332-4.
https://doi.org/ 10.1016/j.gaitpost.2012.03.014
- Hamill
J, van Emmerik R, Heiderscheit
B, Li L. A dynamical systems approach to lower extremity running injuries. Clin
Biomech (Bristol, Avon) 1999;14:297-308.
https://doi.org/ 10.1016/s0268-0033(98)90092-4
- Ho
C, Holt K, Saltzman E, Wagenaar R. Functional
electrical stimulation changes dynamic resources in children with spastic
cerebral palsy. Phys Ther 2006;86:987-1000.
- Holt
K, Fonseca S, Obusek J. Dynamic and thermodynamic
constraints and the metabolic cost of locomotion. In: Sparrow W. Energetics of
human activity. 1ª ed. Champaign: Human Kinetics; 2000. p. 255-85.
- Obusek J, Holt K, Rosenstein R. The
hybrid mass-spring pendulum model of human leg swinging: stiffness in the
control of cycle period. Biol Cybern 1995;73:139-47. https://doi.org/10.1007/BF00204052
- Holt
K. Constraints in the emergence of preferred locomotory patterns. In: Rosenbaum
DA, Collyer C. Timing of Behavior: Neural, psychological, and computational
perspectives. 1ª ed. Cambridge: MIT Press; 1998. p. 261-91.
- Holt
K, Saltzman E, Ho C, Kubo M, Ulrich B. Discovery of the pendulum and spring
dynamics in the early stages of walking. J Mot Behav 2006;38:206-18. https://doi.org/ 10.3200/JMBR.38.3.206-218
- Holt
K, Saltzman E, Ho C, Ulrich B. Scaling of dynamics in the earliest stages of
walking. Phys Ther 2007;87:1458-67.
https://doi.org/10.2522/ptj.20060299
- Vaughan
CL, Langerak NG, O´Malley MJ. Neuromaturation of
human locomotion revealed by non-dimensional scaling. Exp Brain Res 2003;153:123-7. https://doi.org/10.1007/s00221-003-1635-x
- Turvey
M. Coordination. Am Psychol 1990;45:938-53.
- Wagenaar R, van Emmerik R. Dynamics of pathological gait. Hum Mov Sci 1994;13:441-71.
- van
Emmerik R, Wagenaar R.
Effects of walking velocity on relative phase dynamics in the trunk in human
walking. J Biomechanics 1996;29:1175-84.
https://doi.org/10.1016/0021-9290(95)00128-x
- Lamoth C, Beek
P, Meijer O. Pelvis-thorax coordination in the transverse plane during gait.
Gait Posture 2002;16:101-14. https://doi.org/10.1016/s0966-6362(01)00146-1
- Lamontagne
A, Serres SJ, Fung J, Paquet N. Stroke affects the
coordination and stabilization of head, thorax and pélvis
during voluntary horizontal head motions performed in walking. Clin Neurophysiol 2005;116:101-11. https://doi.org/10.1016/j.clinph.2004.07.027
- Stephenson
JL, Lamontagne A, De Serres SJ. The coordination of
upper and lower limb movements during gait in healthy and stroke individuals.
Gait Post 2009;29:11-16.
https://di.org/10.1016/j.gaitpost.2008.05.013
- Meyns P, Gestel
LV, Bruijin SM, Desloovere
K, Swinnen SP, Duysens J.
Is interlimb coordination during walking preserved in children with cerebral
palsy? Res Dev Disabil 2012;33:1418-28.
https://doi.org/10.1016/j.ridd.2012.03.020
- Lamoth CJC, Meijer OG, Wuisman PIJM, Dieën JH, Levin MF,
Beek PJ. Pelvis- Thorax coordination in the
transverse plane during walking in persons with nonspecific low back pain.
Spine 2002;27:E92-99.
- Hreljac
A. Effects of physical characteristics on the gait transition speed during
human locomotion. Hum Mov Sci 1995;14:205-16.
https://doi.org/10.1016/0167-9457(95)00017-M
- Cavagna GA, Heglund NC, Taylor CR. Mechanical work in terrestrial
locomotion: two basic mechanisms for minimizing energy expenditure. Am J Physiol
1977;233:R243-261. https://doi.org/10.1152/ajpregu.1977.233.5.R243
- Fonseca
S, Holt K, Fetters L, Saltzman E. Dynamical resources used in ambulation by
children with spastic hemiplegic cerebral palsy: Relationship to kinematics,
energetics, and asymmetries. Phys Ther 2004;84:344-54. https://doi.org/10.1093/ptj/84.4.344
- Diedrich
FJ, Warren Junior W. Why change gaits? Dynamics of the walk-run transition. J
Exp Psychol Hum Percept Perform 1995;21:183-202.
https://doi.org/10.1037//0096-1523.21.1.183
- Jeng SF, Holt KG, Fetters L, Certo C. Self-optimization of walking in nondisabled
children and children with spastic hemiplegic cerebral palsy. J Mot Behav 1996;28:15-27.
https://doi.org/10.1080/00222895.1996.9941729
- Skrotzky K. Gait analysis in
cerebral palsied and nonhandicapped children. Arch Phys Med Rehabil
1983;64:291-5.
- Lamoth CJC, Daffertshofer
A, Meijer OG, Moseley GL, Wuisman PIJM, Beek PJ. Effects of experimentally induced pain and fear of
pain on trunk coordination and back muscle activity during walking. Clin Biomech (Bristol, Avon) 2004;19:551-63. https://doi.org/10.1016/j.clinbiomech.2003.10.006